

Последние записи
- Проверка на шестнадцатеричный формат записи
- Отдать пользователю файл с помощью file_get_contents()
- Написать собственую функцию operator[] для битов
- Проблема с движением 2D человека
- OpenGl.Создание винтовой лестницы
- Склеить несколько файлов в один
- Windows 10 сменить администратора
- Рандомное слайдшоу
- Событие для произвольной области внутри TImage
- Удаление папки с файлами

Интенсив по Python: Работа с API и фреймворками 24-26 ИЮНЯ 2022. Знаете Python, но хотите расширить свои навыки?
Slurm подготовили для вас особенный продукт! Оставить заявку по ссылке - https://slurm.club/3MeqNEk

Online-курс Java с оплатой после трудоустройства. Каждый выпускник получает предложение о работе
И зарплату на 30% выше ожидаемой, подробнее на сайте академии, ссылка - ttps://clck.ru/fCrQw
7th
Май
 Как сделать ссылку в Label?
Как сделать ссылку в Label?
ShellExecute(handle, ‘open’, ‘http://www.programmersforum.ru’, nil, nil, SW_SHOW);
7th
Подключения запароленной базы данных Access
Баламут:
Для подключения запароленной базы используется строка подключения примерно следующего вида:
AdoConnection1.ConnectionString:= ‘Provider=Microsoft.Jet.OLEDB.4.0;’+
’Data Source=имя_базы.mdb;Persist Security Info=False;’+
’Jet OLEDB:Database Password=ПАРОЛЬ‘;
6th
Май
Рассылка. Выпуск 57
 От ведущего рассылки.
От ведущего рассылки.
Приветствую Вас в Клубе ПРОграммистов!! Сегодня выходит очередной 57 выпуск рассылки от клуба.
В этом номере будут самые интересные темы и статьи клуба, форума, а так же статьи из журнала ПРОграммист, который ведут наши участники, ну и немного юмора.
4th
Май
Delphi 7 или RAD 2010?
Человек_Борща:
Интересует вопрос.. в чем отличия Borland Delphi 7 от Embracode RAD 2010?
4th
Самые посещаемые страницы сайта Delphibasics.ru
Подготавливаю баннеры на основе самых посещаемых страниц сайта DelphiBasics.ru – Основы Delphi в апреле 2010 года.
Самые посещаемые – вверху
1. MessageDlg
Функция MessageDlg используется для отображения сообщений пользователю. Эти сообщения могут быть информационными, предупреждающими или что бы то ни было. Даётся полный свободный выбор кнопок, которые пользователь может нажать, чтобы подтвердить диалог.

2. Random
Функция Random генерирует случайные числа. Это могут быть числа с плавающей запятой числами в диапазоне:
0 <= Number <1.0
или целые числа в диапазоне:
0 <= Number

3. TStringList
Тип TStringList cодержит список переменной длины, состоящий из строк
Список может быть сформирован строка за строкой, или загружен из большой строки разделенной запятой или даже из текстового файла.

4. ShowMessage
Процедура ShowMessage выводит простое диалоговое окно на экране с кнопкой ОК, содержащее строку Text.

5. Copy
Функция Copy имеет 2 формы. В первом случае она создает новую строку из части существующей строки. Во втором – она создает новый массив из части существующего массива.

6. Exp
Функция Exp является математической функцией, она возвращает экспоненту числа.

7. Format
Функция Format обеспечивает ‘C’ подобное форматирование множества простых типов данных в строке. Она обеспечивает очень точное управление по этому форматированию.

8. String
Тип данных String используется, чтобы хранить последовательность символов (строки).

9. Array
Ключевое слово Array обеспечивает одномерные и многомерные массивы данных.

10. Ord
Функция Ord возвращает целочисленное значение для любого перечислимого типа Arg.
Это используется преимущественно, чтобы преобразовать символы или перечисления в их числовые эквиваленты.

11. Trunc
Функция Trunc возвращает целочисленную часть числа с плавающей запятой.

12. SetLength
Процедура SetLength изменяет размер строки, одномерного динамического массива или многомерного динамического массива

3rd
Май
Пример авторизации на WordPress
Пример авторизации на WordPress и получения результата авторизации (поиск “action=logout” на странице, вместо “action=logout” может быть любое слово/ссылка для проверки):
var
post:TStringList;
result:string;
begin
post:=TStringList.Create;
try
// Параметры
post.Add(’log=admin’);
post.Add(’pwd=123456′);
post.Add(’rememberme=forever’);
post.Add(’wp-submit=Войти’);
post.Add(’redirect_to=http://site.net/wp-admin/’);
post.Add(’testcookie=1′);
// Отправляем данные
result:=IdHTTP1.Post(’http://site.net/wp-login.php’, post);
// Результат (поиск “action=logout” на странице после авторизации)
if Pos(’action=logout’, result)>0 then
MessageDlg(’Авторизация прошла успешно!(искомый текст на странице найден)’, mtInformation, [mbOK],0)
else
MessageDlg(’Авторизация Провалилась!(искомый текст не найден)’, mtInformation, [mbOK],0);
except
post.Free;
end;
1st
Май
Сортировка чисел методом Черпака?
Наглядный пример сортировки чисел методом Черпака?
using System;
using System.Collections.Generic;
using System.Text;
namespace BucketSort
{
class BucketSort
{
private void Sort(int[] integers)
{
//Verify input
if (integers == null || integers.Length == 0)
return;
//Find the maximum and minimum values in the array
int maxValue = integers[0]; //start with first element
int minValue = integers[0];
//Note: start from index 1
for (int i = 1; i < integers.Length; i++)
{
if (integers > maxValue)
maxValue = integers;
if (integers < minValue)
minValue = integers;
}
//Create a temporary “bucket” to store the values in order
//each value will be stored in its corresponding index
//scooting everything over to the left as much as possible (minValue)
//e.g. 34 => index at 34 – minValue
List<int>[] bucket = new List<int>[maxValue — minValue + 1];
//Initialize the bucket
for (int i = 0; i < bucket.Length; i++)
{
bucket = new List<int>();
}
//Move items to bucket
for (int i = 0; i < integers.Length; i++)
{
bucket[integers – minValue].Add(integers);
}
//Move items in the bucket back to the original array in order
int k = 0; //index for original array
for (int i = 0; i < bucket.Length; i++)
{
if (bucket.Count > 0)
{
for (int j = 0; j < bucket.Count; j++)
{
integers[k] = bucket[j];
k++;
}
}
}
}
}
}
1st
Работа с Xml в Delphi
Скандербег:
Инструкция для Delphi 7.
Скачиваем простой XML парсер ECXML_Parser.zip
Создаем каталог “ECXMLParser”, там где находится Delphi (или любой другой, по вкусу).
Распаковываем в этот каталог скачанный архив.Запускаем Delphi.
Закрываем загруженный проект File->Close All.
Вызываем команду Open (File->Open…).
Из нашего каталога выуживаем файл ECXMLParserD70.dpk
Нажимаем на кнопку Compile. После компиляции нажимаем кнопку Install.В палитре компонентов должна появиться закладка с надписью “EC Test”, где находятся два компонента.
Закрываем проект ECXMLParserD70. На запрос “записать/не записать” отвечаем: “ни за что”.Создаем новый проект. На его форму кидаем TButton, TMemo и из новой закладки компонент TECXMLParser.
У компонента TECXMLParser свойство Name меняем на XML (для того чтобы была совместимость с приведенным ниже кодом), хотя такое и не обязательно, тогда в процедуре надо будет поменять XML на свое имя. К событию OnClick кнопки привязываем процедуру, где пишем такой текст:procedure TForm1.Button2Click(Sender: TObject);
procedure DrawXMLItem(XMLItem: TXMLItem);
var
I : Integer;
begin
Memo1.Lines.Add(XMLItem.Name+’ : ‘+XMLItem.Text);
for i := 0 to XMLItem.SubItemCount-1 do
DrawXMLItem(XMLItem.SubItems);
end;begin
XML.LoadFromFile(’E:\file.xml’); //любой xml файл, для тестирования можно и здесь указать
Memo1.Lines.BeginUpdate;
DrawXMLItem(XML.Root);
Memo1.Lines.EndUpdate;
end;В результате работы этой процедуры в Memo должны появиться строки вида: : .
Текст представляемый свойством XMLItem.Text – и есть требуемые значения.Это и будет первое упражнение по работе с файлами XML формата. Для первых экспериментов не советую брать штатый дельфийский XML разборщик – сложновато будет и глюкавый он, на самом деле.
30th
Апр
Что, где, когда или с чего начать программировать?
Многие хотят стать программистами или же улучшить свои познания в этом увлекательном занятии. Но, как только человек хочет начать, что-то осваивать, перед ним встает вопрос: «…а с чего начать?». Собственно в данной статье, я попытаюсь ответить на этот распространенный вопрос.
Что, где, когда или… с чего начать программировать?
Пискунов Денис
by spamer www.programmersforum.ru
В связи с тем, что в Интернете, да и не только в нем, довольно часто можно встретить людей, которые далеки от программирования, но желают постигнуть его и которые знают некоторые азы сего занятия, но не знают, что им делать дальше, я и пишу данную статью.
«В первый раз – в первый класс»
Для начала, человеку желающему научиться программировать, необходимо скачать/купить книгу по какому-то языку программирования. Я бы советовал для начала скачать электронную книгу, потому-что вдруг вам это занятие не понравится, а деньги на бумажную версию будут уже потрачены. Теперь давайте определимся с языком.
Многие, уже знающие люди, начинают спорить на счет-того, какой язык лучше выбрать начинающим для изучения. Но в нашем случае, я спорить ни с кем не буду, а просто посоветую для начала выбрать язык программирования Pascal. С чем связан такой выбор? Да все очень просто, начинающему будет намного проще понять логику работы программы (алгоритма) в Pascal’е, чем скажем, например в С++ или Assembler.
Так, с языком определились. Теперь вернемся к выбору книги. Как в интернете, так и на прилавках магазинов, лежит огромное количество разнообразной литературы по программированию. А какой-же учебник скачать/купить нам? Скажу сразу, ни в коем случае не покупайте книги типа «Программирование для чайников». Полезного из такой брошюры вы не возьмете ничего, а вот представление о программировании, после ее прочтения, у вас будет неправильное, а то и вообще пугающее. Собственно по Pascal’ю советую следующие материалы и учебники [1-4]. В данной литературе предоставляется хорошее и понятное описание структуры языка, команд, структур данных и т.д. Также присутствуют примеры решения задач и задания для самостоятельного выполнения.
Выбираем среду разработки [5-7]
С языком и обучающим материалом определились. И вот теперь осталось выбрать и установить среду для написания программы или как правильнее – «Интегрированную среду разработки» (IDE, Integrated development environment). Собственно, что представляет собой IDE? Попросту, это набор программных средств, при помощи которых программист разрабатывает программное обеспечение. Так как изучать мы будем чистый Pascal, то и приложения мы будем писать консольные, посему я советую следующую среду разработки – Turbo Pascal 7.0 и кросс-платформенный компилятор FreePascal. Конечно, можно выбрать и что-то современнее, например TurboDelphi, Delphi 2010 или альтернативный Geany. Но для новичка в программировании, я считаю – это будет неправильно, так как в IDE Delphi увидеть логику работы программы, структуру языка и т.д., будет тяжело.
После вот таких приготовлений – садимся читать выбранную книгу, и хочу заметить, не просто читать, а читать, запоминать и разбираться в написанном. Если будете просто читать книжку, то вы потратите свое время в пустую. Поэтому, после получения некоторого теоретического материала, обязательно необходимо все полученные знания закрепить на практике. А точнее – садимся и пишем свою первую программу… Hello World J. Справились с этой задачей, ставим себе новую и реализуем, не знаете, что себе задать – в учебниках есть практические задания. После прочтения книги и при имеющихся знаниях – сделайте свой собственный не большой проект, например «Телефонный справочник», «вариант игрушки» и т.д.
Далее, после того, как вы чувствуете, что довольно хорошо владеете изученным языком, а возможно и уже некой технологией, необходимо решить для себя: «…а нравится-ли мне данная отрасль программирования?». Для ответа на этот вопрос, с помощью любого поисковика ищем информацию о следующих, так сказать, видах программирования:
. системное программирование
. прикладное программирование
. веб – программирование
После прочтения соответствующей информации и при уже имеющихся знаниях в программировании – вы должны выбрать дальнейший вид поля своей деятельности. Если вы определились, тогда начинайте углубленное изучение* выбранного направления.
* Помимо чтения литературы, также желательно общаться на соответствующих форумах. Например, выберите для себя один или два форума и, так сказать – «живите на них». На таких ресурсах Интернета можно довольно много узнать полезной информации, поделиться с кем-то такой-же информацией. Также всегда можно попросить помощи у профессионалов, например, что бы вам объяснили непонятный момент при изучении.
Вот еще такой нюанс – не надо думать, что программирование заключается только в знании языков программирования. Если вы хотите стать действительно хорошим программистом, то вам обязательно нужно знать дополнительные технологии. Например, можно полностью посвятить себя изучению программирования графики, попутно ознакомиться с разнообразными графическими библиотеками, алгоритмами, связанными с графикой и т.д. Следовательно, для достижения каких-либо целей, вам всегда необходимо читать соответствующую литературу, а также запомнить один из основных моментов – научиться пользоваться поиском. Так как большинство вопросов уже обсуждалось в Интернете, то правильный запрос в поисковую систему даст вам интересующий ответ.
Заключение
И не бойтесь спрашивать знающих людей о том, что не знаете сами – ничего предосудительного в этом нет. В общем, не надо ждать доброго дяденьку, который придет, все Вам разжует и в рот положит, а начинайте сами достигать поставленной цели. Так что, дерзайте.
Ресурсы
. Т.А. Павловская. Паскаль. Программирование на языке высокого уровня: практикум. – С.Петербург, Питер
-Юг, 2003
. Валерий Попов. Паскаль и Дельфи. Самоучитель. – С.Петербург, Питер, 2003
. В.В. Фаронов. Turbo Pascal 7.0. Начальный курс: учебное пособие. – М., КноРус, 2007
. А.Я. Архангельский. Язык Pascal и основы программирования в Delphi. – М., Бином-Пресс, 2008
. Скачать компилятор FreePascal http://www.freepascal.org/download.var
. Скачать компилятор Geany http://download.geany.org
. Скачать компиляторы DELPHI http://delphilab.ru
Статья из второго выпуска “журнала ПРОграммистов”.
Скачать этот номер можно по ссылке.
Ознакомиться со всеми номерами журнала.
Обсудить на форуме — Что, где, когда или… с чего начать программировать?
30th
Изменения в языке Дельфи 2010
Задача предназначена для представления краткого обзора нововведений в язык Дельфи (2010) по сравнению с Дельфи 7.
Изменения в языке Дельфи 2010
Utkin
Благодаря активным попыткам компании Embecadero влиять на рынок продуктов разработки программ язык Дельфи быстро развивается, однако это развитие направлено в основном на попытки наверстать все нововведения в современных языках программирования (таких как С#). Никаких принципиально новых разработок и концепций не внедряется.
Директива Inline (появилась в Дельфи 2005)
По аналогии с С++, функции и процедуры теперь могут быть встраиваемыми со всеми вытекающими последствиями. А именно использование данной директивы не гарантирует вставку тела функции вместо ее вызова. Кроме того, существует еще целый ряд ограничений (согласно справочной системе). Эта директива бесполезна:
. при позднем связывании (virtual, dynamic, message);
. для функций и процедур имеющих ассемблерные вставки;
. для конструкторов и деструкторов, там она работать не будет (о чем Вам компилятор обязательно пожалуется);
. для главного блока программы, секций инициализации и финализации модулей;
. если метод класса обращается к членам класса с более низкой видимостью, чем сам метод. Например, если public метод обращается к private методу, то для такого метода inline-подстановка осуществляться не будет;
. для процедур и функций, которые используются в выражениях проверки условия циклов while и repeat.
Как сделать процедуру встроенной?
Procedure Add (var x: Integer; y: Integer); Inline;
Регулировать поведение inline можно следующими директивами:
{$INLINE ON} – по умолчанию включена, разрешает работу Inline;
{$INLINE AUTO} – будет осуществлена попытка встраивание кода функций и процедур, если:
а) они помечены как Inline;
б) если их размер будет менее 32-х байт.
{$INLINE OFF} – не разрешает работу Inline.
Следует отметить, что и в классическом С++ Inline никогда не была высокоэффективным механизмом, а учитывая ограничения, накладываемые компилятором Дельфи, ее использование под большим вопросом.
Перегрузка операторов (появилась в Delphi.Net)
В отличие от С++ перегрузка осуществляется немного по-другому. Для перегрузки операторов перегружается не символ оператора, а его символическое обозначение (сигнатура). Перегружать можно только для операций с экземплярами классов.
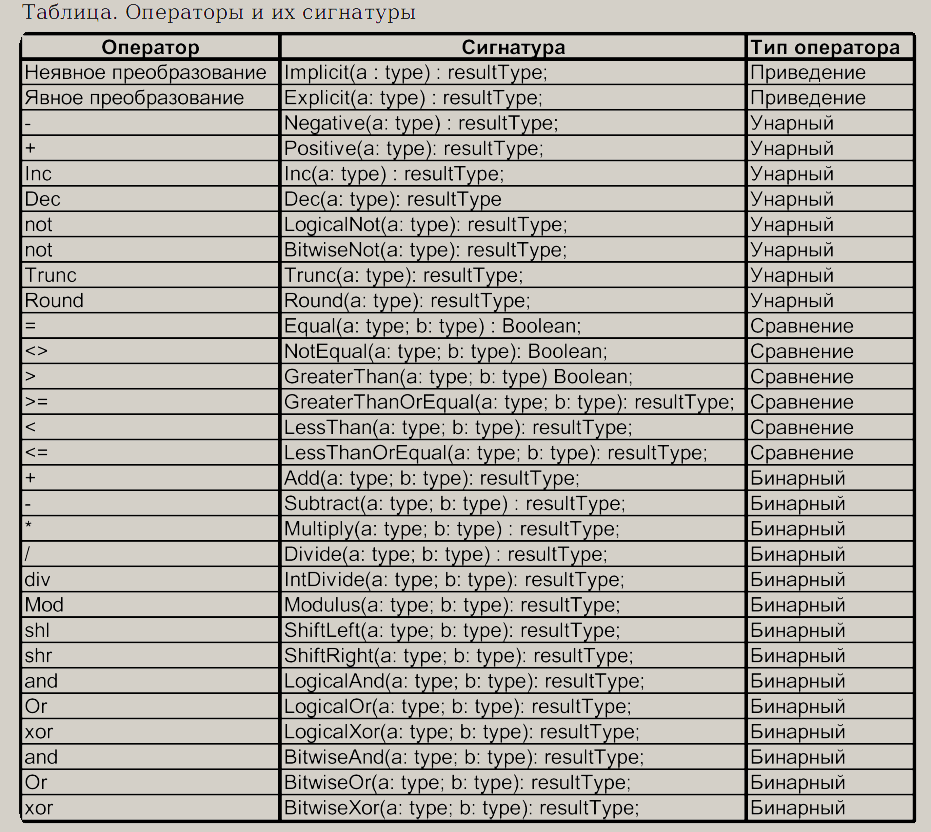
Нужно обратить внимание – TRUNC, ROUND, INC, DEC считаются операторами, а не процедурами и функциями.
Вот пример использования:
TMyClass = class
class operator Add(a, b: TMyClass): TMyClass; // Перегрузка сложение для TMyClass
class operator Subtract(a, b: TMyClass): TMyclass; // Вычитание для TMyClass
class operator Implicit(a: Integer): TMyClass; // Неявное преобразование Integer в TMyClass
class operator Implicit(a: TMyClass): Integer; // Неявное преобразование TMyClass в Integer
class operator Explicit(a: Double): TMyClass; // Явное преобразование Double в TMyClass
end;
// Пример описание сигнатуры Add для перегрузки сложения для типа TMyClass
TMyClass.Add(a, b: TMyClass): TMyClass;
begin
…
end;
var
x, y: TMyClassbegin
x := 12; // Неявное преобразование из Integer
y := x + x; // Вызов TMyClass.Add(a, b: TMyClass): TMyClass
b := b + 100; // Вызов TMyClass.Add(b, TMyClass.Implicit(100))
end;
Подробней о перегрузке операторов можно почитать здесь: http://www.realcoding.net/articles/delphinet-peregruzka-operatorov.html
Помощники класса (Class Helpers)
Интересный механизм (ответ Дельфи на расширители классов в С#), призванный решить некоторые проблемы в обход наследования. Служит для дополнения класса новыми методами и свойствами.
type
TMyClass = class
procedure MyProc;
function MyFunc: Integer;
end;
…
procedure TMyClass.MyProc;
var
X: Integer;
begin
X := MyFunc;
end;
function TMyClass.MyFunc: Integer;
begin
…
end;
…
type
TMyClassHelper = class helper for TMyClass
procedure HelloWorld;
function MyFunc: Integer;
end;
…
procedure TMyClassHelper.HelloWorld;
begin
WriteLn(Self.ClassName); // Здесь будет возвращен тип TMyClass, а не TMyClassHelper
end;
function TMyClassHelper.MyFunc: Integer;
begin
…
end;
…
var
X: TMyClass;
Begin
X := TMyClass.Create;
X.MyProc; // Вызов TMyClass.MyProc
X.HelloWorld; // Вызов TMyClassHelper.HelloWorld
X.MyFunc; // Вызов TMyClassHelper.MyFunc
end;
По сути, вариация на тему множественного наследования, но есть одна особенность – помощники класса позволяют дополнять любой существующий класс, без создания нового. Обратите внимание, что механизм помощника класса не использует явного упоминания Self при обращении к полям класса (помогаемого класса). То есть, HelloWorld имеет право обращаться к полям TMyClass (просто в нашем примере их нет). Аналогично TMyClass также имеет доступ к полям TMyClassHelper (в случае, если класс и его помощник объявлены в одном модуле).
С практической точки зрения удобный механизм, кроме одной детали – класс должен иметь только одного помощника, имеет ли он помощника проверить во время выполнения программы нельзя. Если в классе имеется несколько помощников (неважно в каком юните, лишь бы он видел класс), считаться рабочим будет только самый последний из объявленных. Это значит, что если TMyClass уже имел помощника, то будут доступны методы именно TMyClassHelper, поскольку именно он объявлен последним. Таким образом, в лучшем случае, два и более помощника для одного класса вызовут ошибку компиляции, в худшем трудно отлавливаемую ошибку, жалобы программиста на багги в IDE и компиляторе и много потерянного времени. Чем сложней проект, тем трудней будет установить причину ошибки.
С теоретической точки зрения механизм противоречивый – он увеличивает сцепляемость объектов и юнитов между собой. Перед использованием помощника, я должен проверить все модули, из которых доступен данный класс на предмет проверки существования такого помощника (представьте большой проект). Это нарушает принципы инкапсуляции – если раньше перед использованием класса нужно было знать только его интерфейс, то теперь для использования помощников, я должен отслеживать существование класса во всех модулях, где имеется доступ к данному классу. С этого момента механизм интерфейсов уже не играет особой роли, поскольку, обращаясь к объекту какого-либо класса, всегда можно обнаружить такой букет неизвестных методов, что интерфейсная часть класса становится даже вредной. Это нарушает принцип сокрытия данных – благодаря помощникам я могу менять работу своих и чужих классов и могу иметь доступ к его полям (в рамках юнита). Кстати, это ограничение на доступ к полям в рамках юнита также сводит на нет многие его плюсы – проще вписать новые методы в сам класс (или наследовать новый), чем создавать путаницу в классе, юните и проекте.
Записи стали объектами
И теперь имеют свои методы, свойства и конструкторы.
type
TMyRecord = record
type
TInnerColorType = Integer;
var
Red: Integer;
class var
Blue: Integer;
procedure printRed();
constructor Create(val: Integer);
property RedProperty: TInnerColorType read Red write Red;
class property BlueProp: TInnerColorType read Blue write Blue;
end;
constructor TMyRecord.Create(val: Integer);
begin
Red := val;
end;
procedure TMyRecord.printRed;
begin
writeln(’Red: ‘, Red);
end;
Но, сокращенная запись по-прежнему разрешена (поэтому старые проекты должны переноситься и с сокращенной формой записей).
Абстрактные классы
type
TAbstractClass = class abstract
procedure SomeProcedure;
end;
Разрешены полностью абстрактные классы (раньше допускались только конкретные методы), содержащие объявления методов для дальнейшего их перекрытия в потомках.
strict private и strict protected
Строгое private – метод или свойство для класса и невидимое никому, вне класса даже в рамках текущего юнита.
Строгое protected – методы в этой секции будут видимы самому классу и его наследникам.
Таким образом, полное объявление выглядит теперь так
type
TKlass = class(TForm)
strict protected
protected
strict private
private
public
published
automated
end;
Не наследуемые классы
По аналогии с С#, в Дельфи 2010 существуют классы от которых дальнейшее наследование невозможно:
type
TAbstractClass = class sealed
procedure SomeProcedure;
end;
Весьма сомнительное удовольствие для рядового разработчика. Никаких реальных преимуществ такой класс не дает. Точные причины создания такого механизма не известны и преимущества от его использования очень призрачны – наследование не разрушает класса предка, поэтому и запечатывать их особой необходимости нет. Считается, что запечатанные классы работают быстрей обычных (сам не проверял) и они применяются для .NET платформы (сугубо в утилитарных целях – не все обертки над низкоуровневыми операциями, такими как WinApi, можно сделать наследуемыми).
Классовые константы (возникло в Delphi ![]()
Классы могут иметь константы – сами классы, а не порождаемые от них объекты.
type
TClassWithConstant = class
public
const SomeConst = ‘This is a class constant’;
end;
procedure TForm1.FormCreate(Sender: TObject);
begin
ShowMessage(TClassWithConstant.SomeConst);
end;
Классовые типы (возникло в Delphi ![]()
Класс может теперь содержать описание типа, которое можно использовать только в пределах данного класса.
type
TClassWithClassType = class
private
type
TRecordWithinAClass = record
SomeField: string;
end;
public
class var
RecordWithinAClass: TRecordWithinAClass;
end;
…
procedure TForm1.FormCreate(Sender: TObject);
begin
TClassWithClassType.RecordWithinAClass.SomeField := ‘This is a field of a class type declaration’;
ShowMessage(TClassWithClassType.RecordWithinAClass.SomeField);
end;
Еще одно сомнительное удовольствие. Описание типа это не конкретная структура, зачем прятать его описание в тело класса?
Классовые переменные (возникло в Delphi ![]()
Класс может содержать переменные по аналогии с константами:
Type
X = class (TObject)
Public
Var
Y: Integer;
End;
Пожалуй, единственное, где это может пригодиться это работа с RTTI, вообще классы в Дельфи стали больше напоминать юниты – такие вот юниты внутри юнитов. Обратите внимание, что переменные класса могут находиться в любой секции (секции в данном случае влияют на область видимости данных переменных), тогда как поля класса не могут быть public (в Дельфи 7 могли). Применение статических полей в классе делает Дельфи все более ориентированным в сторону С# (и менее в сторону Паскаля).
Вложенные классы
Теперь классы можно объявлять внутри классов, цель избежать конфликта имен, локализовать все связанные классы между собой:
type
TOuterClass = class
strict private
MyField: Integer;
public
type
TInnerClass = class
public
MyInnerField: Integer;
procedure InnerProc;
end;
procedure OuterProc;
end;
procedure TOuterClass.TInnerClass.InnerProc;
begin
…
end;
Классы все больше перенимают концепцию модулей. Понятно, что данное нововведение дань .Net, но реальной пользы от него опять же не очень много – раньше конфликта имен избегали префиксами A и F, не могу сказать, что новый механизм дал программистам новые возможности. Также как и попытка использовать вложенные классы для складывания всего в одну большую кучу наряду с помощниками классов сильно напоминают лебедь, рак и щуку, растаскивающие Дельфи в разные стороны.
Финальные методы класса
В классах можно создавать виртуальные методы, которые перекрыть нельзя:
TAbstractClass = class abstract
public
procedure Bar; virtual;
end;
TFinalMethodClass = class(TAbstractClass)
public
procedure Bar; override; final;
end;
Переопределить «Bar» уже больше нельзя.
Статические методы класса
У классов могут быть статические методы класса – то есть методы, которые можно вызвать от типа класса. Такие методы не имеют доступа к полям класса (также как и не могут получить Self на конкретный экземпляр данного класса):
type
TMyClass = class
strict private
class var
FX: Integer;
strict protected
// Note: accessors for class properties must be declared class static.
class function GetX: Integer; static;
class procedure SetX(val: Integer); static;
public
class property X: Integer read GetX write SetX;
class procedure StatProc(s: String); static;
end;
TMyClass.X := 17;
TMyClass.StatProc(’Hello’);
Здесь же представлен пример организации свойств классов. Их использование полностью аналогично использованию переменных и констант класса.
for-element-in-collection
Теперь компилятор способен распознавать итерации в контейнерах:
for Element in ArrayExpr do Stmt;
for Element in StringExpr do Stmt;
for Element in SetExpr do Stmt;
for Element in CollectionExpr do Stmt;
Вот развернутый пример:
var
A: Array [1..6] of String;
I: String;
….
for i in A do
begin
Memo1.Lines.Add(i);
end;
Обратите внимание, что I имеет тип String это не индекс массива, а конкретные значения, которые будут получаться из массива. Кое-где конечно автоматизирует, но представьте, что мне нужно написать некий метод, в котором происходит копирование одного массива в другой. Использовать все равно придется стандартный цикл for, либо писать еще один метод – добавление элемента в массив.
Динамическая инициализация массивов
Теперь массивы получили свои конструкторы:
Type
TMas = Array of String;
Var
Mas: TMas;
Mas := TMas.Create(‘Hello’, ’World’, ’!’);
Я, конечно, не против «Create» как конструктора по умолчанию, но уже сейчас из-за отсутствия внятной русскоязычной литературы по данной теме встречаются статьи, в которых авторитетные господа пишут, что конструктор обязательно должен называться Create (речь идет не только о массивах, но также о записях и конструкторах класса). Так вот конструктор должен называться Create только для массивов. Для всех остальных имя конструктора не обязательно должно быть Create (но желательно, особенно для классов).
Дженерики
Шаблоны, они и в С++ шаблоны. Считается что первые шаблоны возникли в С++, но вообще-то они пришли из функционального программирования и правильное их название параметрический полиморфизм. Явление, когда компилятор сам вырабатывает соответствующие варианты кода на основании обобщенного алгоритма:
TList<T> = class
private
FItems: array of T;
FCount: Integer;
procedure Grow(ACapacity: Integer);
function GetItem(AIndex: Integer): T;
procedure SetItem(AIndex: Integer; AValue: T);
public
procedure Add(const AItem: T);
procedure AddRange(const AItems: array of T);
procedure RemoveAt(AIndex: Integer);
procedure Clear;
property Item[AIndex: Integer]: T read GetItem write SetItem; default;
property Count: Integer read FCount;
end;
Вот пример списка содержащего произвольные (но однотипные элементы). Тип элементов определяется на момент объявления переменной:
ilist: TList<Integer>;
То есть мы создали список целых чисел (а можно, к примеру, список строк). Дженерики удобно использовать применительно к алгоритмам контейнеров данных и комбинаторным алгоритмам. Конкретные реализации алгоритмов можно посмотреть в модуле Generics.Collections, где есть TArray, TList, TStack, TQueue, TDictionary, TObjectList, TObjectQueue, TObjectStack, TObjectDictionary и TEnumerator, способные работать с разными типами данных.
Также необходимо отметить особенность дженериков (и шаблонов в С++) – обобщенные алгоритмы экономят время программиста, сокращая только его код, но для каждого типа (для каждой комбинации типов) всегда генерируется новая версия алгоритма (поэтому размер скомпилированных программ увеличивается).
Заключение
Большинство механизмов представленных здесь:
. обеспечивают совместимость с .NET
. дань моде
. попытка угнаться за Microsoft Visual Studio
Язык не содержит принципиальных отличий и мощных механизмов, которые действительно были бы востребованы именно программистами на языке Дельфи. Все нововведения навязаны, искусственны и не всегда соответствуют концепциям ООП. Большое количество противоречивых инструментов может только запутать программистов и в течение ближайших лет можно ожидать некоторого количества критических статей в адрес языка программирования Дельфи.
Комментарий автора
Личные впечатления о среде сложились следующие: сплошные недоделки (да и в 2009-м не лучше), ждать следующую версию наверно не стоит. FrameWork идет в комплекте, ничего доустанавливать не надо. Несмотря на заявленные требования не ниже 1 гигабайта ОЗУ, у меня и при 512-ти с тормозами, но работает.
Ресурсы
. Хроники «айтишника» http://skiminog.livejournal.com/33610.html
. Общество разработчиков Embecadero http://edn.embarcadero.com
. Углубленный материал по перегрузке операторов в Дельфи http://www.realcoding.net/articles/delphinet-peregruzka-operatorov.html.
. Онлайн-перевод англоязычных материалов статьи http://www.translate.ru
Статья из второго выпуска “журнала ПРОграммистов”.
Скачать этот номер можно по ссылке.
Ознакомиться со всеми номерами журнала.
Облако меток
реестр ассемблер timer TBitMap SaveToFile ShellExecute программы массив советы word MySQL SQL ListView pos random компоненты дата LoadFromFile form база данных сеть html php RichEdit indy строки Win Api tstringlist Image мысли макросы Edit ListBox office C/C++ memo графика StringGrid поиск canvas файл Pascal форма Файлы интернет Microsoft Office Excel excel winapi журнал ПРОграммист DelphiКупить рекламу на сайте за 1000 руб
пишите сюда - alarforum@yandex.ru
Да и по любым другим вопросам пишите на почту

пеллетные котлы

Пеллетный котел Emtas
Наши форумы по программированию:
- Форум Web программирование (веб)
- Delphi форумы
- Форумы C (Си)
- Форум .NET Frameworks (точка нет фреймворки)
- Форум Java (джава)
- Форум низкоуровневое программирование
- Форум VBA (вба)
- Форум OpenGL
- Форум DirectX
- Форум CAD проектирование
- Форум по операционным системам
- Форум Software (Софт)
- Форум Hardware (Компьютерное железо)
